温度・湿度センサーの経年劣化について
※秋月電子のサイトを見ていたら、SHT31の取り扱いが始まっていました(発売日は2017-06-14)。価格も950円と手ごろです。(2017-06-22追記)
温度・湿度センサーのDHT22(RHT03)の経年劣化については、「DHT22を使った温度計・湿度計の製作」でレポートしていますが、およそ1年で湿度が高めに測定される経年劣化が見られました。(使用方法に問題がある可能性は排除できませんが、使用環境については室内使用なので問題は少ないと思います。)
これまで使用したセンサーでは、ストロベリーリナックスで取り扱いのあるSHT11が良いのはわかっていますが、価格が高いので秋月電子で取り扱いの始まったHDC1000を使用したところ、SHT11と近い値が測定され精度も十分であることが確認できました。HDC1000は価格も手ごろなので「HDC1000を使った温度計・湿度計の製作」で新たに製作すると同時に既存のDHT22を使用した温湿度計もこのセンサーに変更しました。
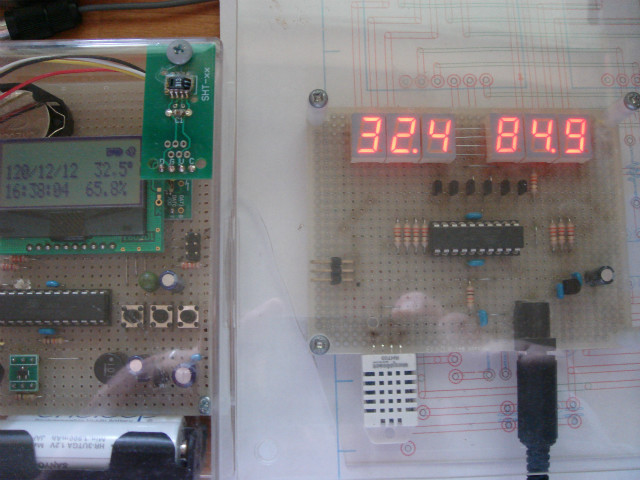
HDC1000の使用を始めたのが2015年7月頃なのであれから1年半以上経過した2017年の3月頃に、家族から「今年の冬は部屋が乾燥することがなくて加湿器をほとんど使用しなかった」と聞かされました。部屋が乾燥したかどうかをHDC1000を使用した温湿度計で見ていたようです。・・・暖房器具(エアコン)を同じように使用していたのに例年よりも湿度が高かったとは思えません。HDC1000の測定する湿度を検証してみました。SHT11を使用したもの2台と比較すると湿度が20%近く高めに測定されます。これは、使用していたHDC1000の2つともほぼ同じように表示されます。
予備として買い置きしてあった新品のHDC1000に交換してみると今度はSHT11に比較して10%以上低く測定されます。新品と古いものとの差は30~40%もあります。・・ということで、まずはっきりしたことは「HDC1000は経年劣化(1年半ほど)で湿度が高く測定されるようになる」ということです。ただ、SHT11も経年劣化している可能性もあるので、HDC1000の新品とSHT11のどちらが正しいかはっきりはわかりません。
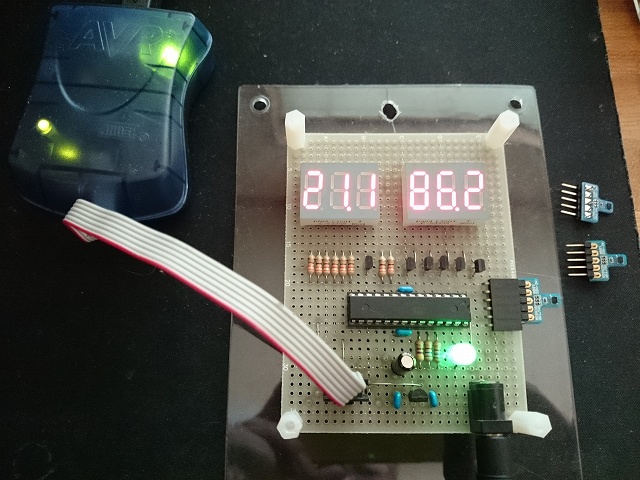
このままHDC1000を使用しても1年半後にはダメになることがわかったので別のセンサーを使用することにします。SHT11を取り扱っているストロベリーリナックスで同じセンシリオン社のSHT31というセンサーが発売されています。このセンサーをHDC1000の代わりに使用することにします。2台のセンサーを交換してプログラム変更を行います。SHT31はHDC1000と同じI2Cによる制御なのでプログラム変更も簡単にできます。SHT31は、SHT11と比較してみると湿度が6%程度低く測定されます。
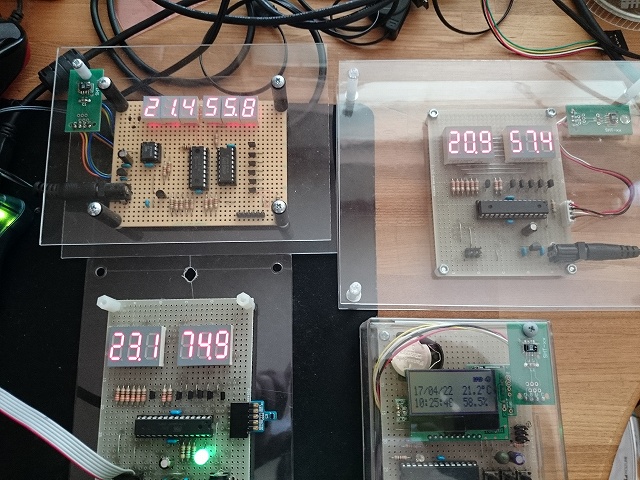
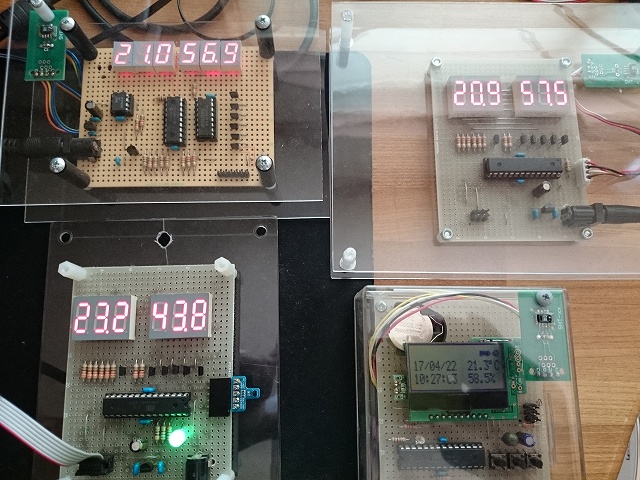
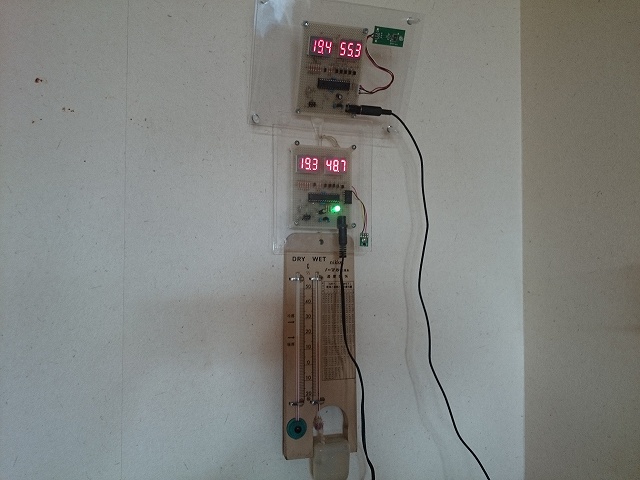
実際の設置場所でSHT31、SHT11と乾湿計の比較観測を行いました。数日間、状況を見ましたが、気温はどれもほぼ同じ値となります。湿度は、SHT11よりもSHT31が6~7%程度高めに測定されます。乾湿計による湿度の値は、SHT11に近似します。(画像の撮影時には乾球19.5℃、湿球14℃なので湿度54%程度となります。)
SHT11を最初に使用したのは2009年です。その後、2011年と2014年にも追加購入し、現在も4個のセンサーを使用していますが、並べて比較するといずれのセンサーも測定値が近似します。つまり、センサーの経年劣化は極めて小さいと判断できます。
これまで使用した温度・湿度センサーについてまとめてみました。値段を調べるために秋月電子でHDC1000を探したのですが、取り扱いがなくなっていました(2017年4月28日現在)。SHT31の長期評価はでていませんが、SHT11とSHT31の価格差は400円程度です。趣味で数個使用する程度であればSHT11を使用したほうが良いと思われます。ただし、SHT11は変則的(I2Cライク)なシリアル通信です。プログラミングは、正式にI2Cに対応したSHT31が簡単です。
| 型名 | メーカー | 価格(円) | 購入先 | 短期精度 | 長期精度 | 備考 |
|---|---|---|---|---|---|---|
| CHS-UGR | TDK | 3456 | 忘れた | ○ | 不明 | 湿度のみ |
| HS-15P | GE | 500 | 秋月電子 | △ | 不明 | 湿度のみ |
| SHT11 | Sensirion | 2095 | ストロベリーリナックス | ○ | ○ | |
| DHT22(RHT03) | MaxDetect | 940 | ストロベリーリナックス | △ | ×(1年程度) | |
| HDC1000 | Texas Instrument | 680 | 秋月電子 | ○ | ×(1年半程度) | |
| SHT31 | Sensirion | 1680 | ストロベリーリナックス | ○ | ○ | |
| SHT31 | Sensirion | 950 | 秋月電子 | ○ | ○ |
今回使用したプログラムソースです。I2C関連はHDC1000の製作時と同じです。AVRはATmega88Pを対象としたものです。もう1台はATTiny861Aを使用したものですが、I2Cライブラリが異なるだけでSHT31制御関連はほぼ同じです。


- henteko
- アンテナチューナーAT50とカーボン釣り竿アンテナ 2023年3月19日
- NanoVNA-H4とスペアナの比較 2022年12月30日
- IRFZ24Nを使ったリニアアンプの試作 2022年12月25日
- 2SK3478を使ったリニアアンプの試作 2022年10月22日
- RD15HVF1を使ったリニアアンプの試作 2022年10月2日
2件のピンバック
HDC1000を使った温度計・湿度計の製作 | henteko.org
グラフィックLCDを利用した気圧計・温度計・湿度計の製作 | henteko.org
コメントは現在停止中です。